The final version of the BLDC driver is working, at last. It is a simple modular controller for sensored BLDC motors with easy-to-understand scalar commutation. The code is work in progress, and should be usable in a few days. The hardware was designed so it could be completely assembled manually without special instruments, and the PCB layout is also DIY-enabled.
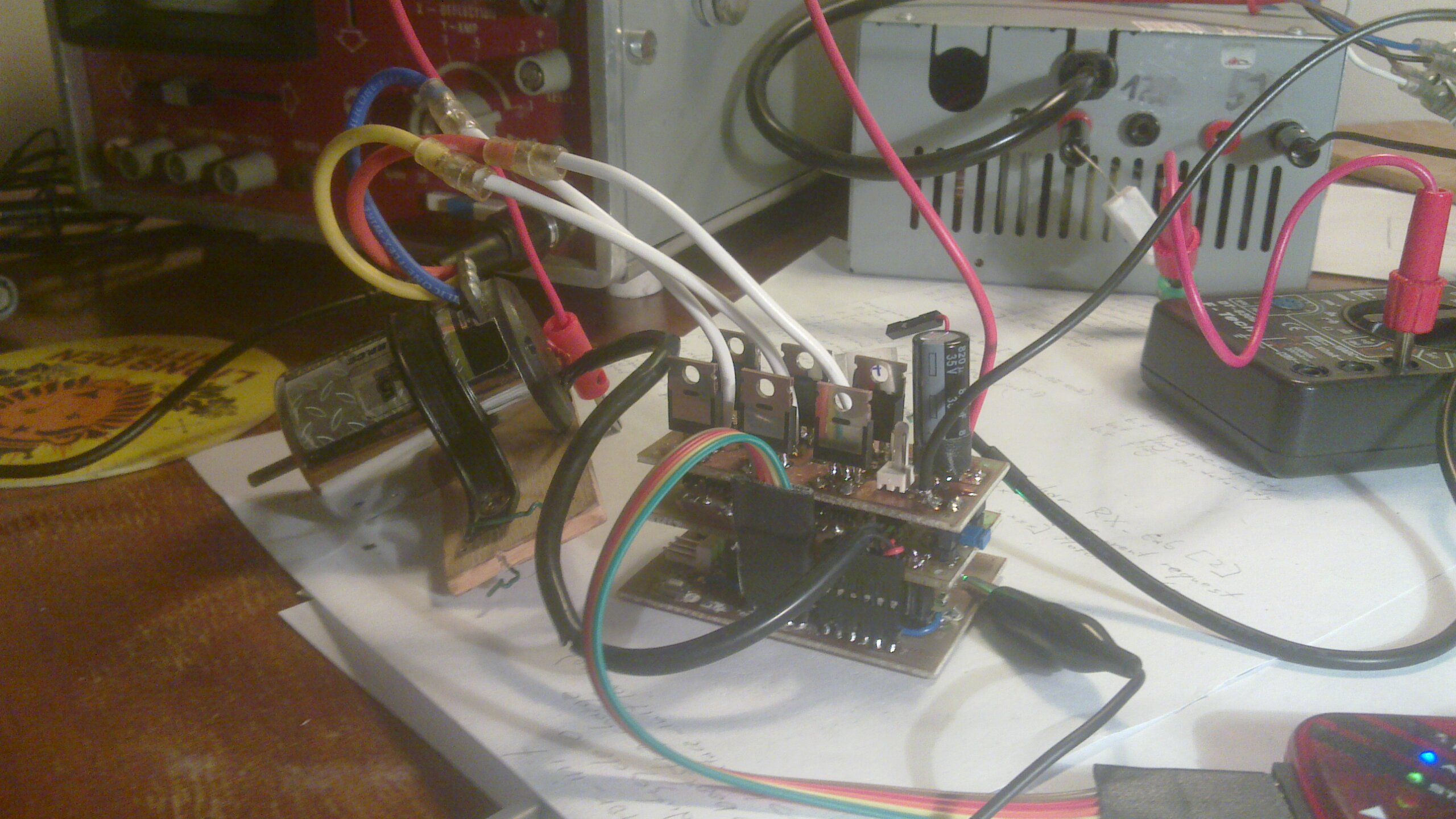
BLDC driver set up.

BLDC driver modules
This whole thing is a part of my diploma project, the goal is to build a model of an electric vehicle. But it is better to think of it as of RaspPi-controlled quad-motor direct-drive RC car, right?
More updates are to pop here shortly.